요약본 발명은 건설 현장에서의 이동 경로를 맵핑하여 이동 경로 정보를 생성하는 위치 확인 모듈과, 상기 건설 현장의 상황을 영상 정보로 수집하는 영상 정보 수집 모듈과, 상기 건설 현장에 위험 객체, 또는 생명체의 존재 여부 및 위치 정보를 감지하는 센서부와, AI 로봇의 구동을 제어하고, 상기 영상 정보와 작업 공정 정보를 비교 및 분석하여 건설 현장의 작업 구역, 또는 이동 경로 상에 위험 객체가 존재하는지 여부를 확인하며, 상기 위험 객체에 대한 위험도를 분석하는 로봇 제어부와, 상기 로봇 제어부로부터 전송되는 정보들을 표시하는 디스플레이부를 포함하는 AI 로봇;을 이용하여 건설 현장의 위험 객체를 인식하여 이 위험 객체로 인한 사고가 발생하는 것을 사전에 방지하고, 사고 발생시에도 신속한 대처가 이루어지도록 하는 AI 로봇을 이용한 건설 현장의 위험 객체 인식 시스템 및 그 방법을 제공하는 것이다.
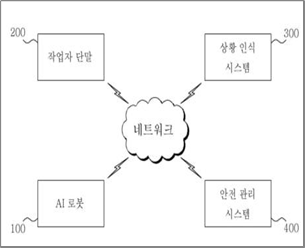
대표 청구항건설 현장에서의 이동 경로를 맵핑하여 이동 경로 정보를 생성하는 위치 확인 모듈과, 상기 건설 현장의 상황을 영상 정보로 수집하는 영상 정보 수집 모듈과, 상기 건설 현장에 위험 객체, 또는 생명체의 존재 여부 및 위치 정보를 감지하는 센서부와, AI 로봇의 구동을 제어하고, 상기 영상 정보와 작업 공정 정보를 비교 및 분석하여 건설 현장의 작업 구역, 또는 이동 경로 상에 위험 객체가 존재하는지 여부를 확인하며, 상기 위험 객체에 대한 위험도를 분석하는 로봇 제어부와, 상기 로봇 제어부로부터 전송되는 정보들을 표시하는 디스플레이부를 포함하는 AI 로봇; 작업자, 또는 현장 관리자의 고유 등록 정보가 저장되고, 상기 AI 로봇과 상기 고유 등록 정보의 송수신이 이루어지도록 구성되며, 작업자가 당일 수행할 작업 공정을 포함하는 당일 작업일지의 입력이 이루어지도록 구성되는 작업자 단말; 및 시공 설계도면을 포함하는 건설 현장 정보, 시공시 수행되는 작업 공정 정보 및 작업 공정별 특성 정보와, 상기 당일 작업일지 정보가 저장되고, 건설 현장 정보와 작업 공정 정보를 분석하여 작업 공정이 수행되는 구역을 설정하고, 설정한 구역정보로 이루어지는 작업 구역 정보와, 작업 공정별 특성 정보를 분석하여 작업 공정을 수행하는 작업자의 행동에 대한 정보와, 작업 공정에 사용되는 작업용 장비들에 대한 위험도를 등급별로 분류하고, 분류한 등급별 위험도로 이루어지는 위험요소 데이터를 생성하여 상기 AI 로봇으로 전송하는 상황 인식 시스템;을 포함하고, 상기 로봇 제어부는, 상기 영상 정보로부터 작업 구역별 영상 정보와 이동 경로 영상 정보로 분할하고, 분할한 각각의 영상 정보로부터 다수의 프레임을 추출할 영상 구간을 선택하고, 선택한 영상 구간으로부터 다수의 프레임을 추출하는 영상 정보 분석부와, 상기 다수의 프레임들과 로봇 메모리에 저장된 작업 공정 정보를 비교 및 분석하여 상황 정보 데이터를 생성하는 위험 객체 분석부와, 상기 다수의 프레임들을 분석하여 상기 작업자의 행동이 작업 공정을 수행하는 행동에 대비하여 적법한 행동인지, 아니면 해당 작업자가 위험한 상태인지 여부를 판단하여, 상기 작업자의 작업 상태 데이터를 생성하는 작업자 행동 분석부와, 상기 상황 정보 데이터 및 작업 상태 데이터를 바탕으로 상기 AI 로봇의 구동을 제어하는 구동 프로세서를 포함하는 제어 프로세서; 및 상기 AI 로봇의 구동을 위한 프로그램 및 상기 프로그램이 수행중에 발생하는 데이터를 저장하고, 상기 상황 인식 시스템으로부터 전송되는 정보들을 저장하는 로봇 메모리;를 포함하며, 상기 위험 객체 분석부는, 작업 공정 정보와 추출된 다수의 프레임들을 비교하여 상기 작업 공정 정보에 포함되어 있는 작업용 장비가 존재하는 프레임들을 선별하고, 선별한 프레임들이 해당하는 구역을 분석하며, 분석한 구역에 상기 작업용 장비가 존재하는 것이 맞는지 여부를 분석하여, 해당 프레임에 위험 객체가 존재하는지 여부를 판단하고, 판단 결과에 대한 상황 정보 데이터를 생성하되, 상기 위험 객체 분석부는, 상기 작업용 장비가 포함되어 있는 프레임들을 선별할 때, 추출된 다수의 프레임들을 작업 공정별로 분류한 후, 공정별 작업용 장비의 존재 여부를 분석하고, 분석한 프레임 상에 상기 작업용 장비에 해당하지 않은 사물이 존재하는 경우, 해당 사물의 위험도를 분석하며, 상기 사물이 위험하다고 판단되는 경우, 해당 작업 공정에서는 상기 사물을 위험 객체로 구분하고, 상기 작업 공정에 해당하는 다수의 프레임들로부터 위험 객체로 구분된 사물에 대한 픽셀을 추출하여 패치정보를 생성하여 로봇 메모리에 저장된 위험요소 데이터를 업데이트하는 것을 더 포함하고, 상기 구동 프로세서는, 상기 위험 객체 분석부로부터 전송되는 상황 정보 데이터에 위험 객체가 존재하는 경우, 상기 위험 객체와 가장 인접한 위치에 있는 다수의 작업자 단말로 위험 객체의 제거를 요청하는 신호를 전송하고, 상기 고유 등록 정보를 가지는 작업자의 현재 위치가 당일 작업일지에 기록된 작업 공정 구역의 위치와 상이한 경우, 상기 작업자의 작업자 단말로 현재 수행해야 할 작업 구역 정보와 위치 정보를 전송하는 것을 특징으로 하는 AI 로봇을 이용한 건설 현장의 위험 객체 인식 시스템.