요약본 발명은 로봇 연동 도포 농도 비전 검사 시스템 및 그 방법에 관한 것으로서, 더욱 상세하게는, 조명 모듈, 비전 모듈과 연동하여 작업물의 위치 및 자세를 제어하는 로봇 모듈을 구성하여, 비전 기반 작업물의 표면 도포 농도 검사를 수행할 수 있는 기술에 관한 것이다.
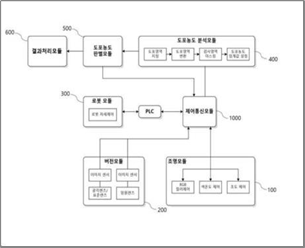
대표 청구항도포 수단을 통해 도포용제가 도포된 작업물의 표면 도포 농도에 대한 비전 검사를 수행하는 시스템에 있어서, 적어도 두 개의 광원 수단을 통해서, 제1 발광 상태 및 제2 발광 상태로, 서로 상이한 스펙트럼 성분을 갖는 각각의 광이 조사되도록 통합 제어하는 조명 모듈; 상기 조명 모듈에 의한 각 발광 상태에 따라 광이 조사되는 작업물을 각각 촬영하여, 적어도 두 개의 이미지 데이터를 획득하는 비전 모듈; 로봇암을 포함하여 구성되며, 도포 작업 전 또는 후의 작업물의 자세 또는, 위치를 제어하는 로봇 모듈; 및 상기 조명 모듈, 비전 모듈 및 로봇 모듈의 동작에 대한 제어 신호를 생성하여, 각각의 동작 상태를 제어하는 통합 제어 모듈; 을 포함하는, 로봇 연동 도포 농도 비전 검사 시스템.