요약본 발명은 휠체어 장착형 로봇팔 제어시스템(1)에 관한 것으로, 더욱 상세하게는 휠체어(3)에 안착하는 사용자의 음성신호를 분석하여 행위 대상인 객체 및 '잡아', '가져와' 등 명령 행위를 특정함으로써, 로봇팔(10)의 정교한 제어를 가능하도록 하면서도 주변 환경에 대한 간섭 없이 손쉽게 객체에 도달하도록 경로 설정하여, 용이한 활용 및 정교한 제어가 가능하도록 하는 휠체어 장착형 로봇팔 제어시스템(1)에 관한 것이다.
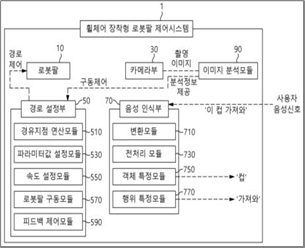
대표 청구항휠체어에 탈착 가능하게 장착되며, 4 자유도를 가지는 로봇팔;상기 로봇팔의 일 측에 장착되어, 이미지 분석모듈에 촬영 이미지를 전달하는 카메라부;그리퍼의 제1 좌표값을 기준으로 객체가 위치하는 목표지점의 제2 좌표값으로 도달하도록 경로를 계획 설정 및 제어하는 경로 설정부;학습모델에 의해 사용자의 음성명령을 분석하여 상기 경로 설정부의 구동을 제어하는 음성 인식부; 및상기 카메라부를 통해 제공되는 촬영 이미지 내 객체를 특정하는 이미지 분석모듈;을 포함하고,상기 로봇팔은일 측이 제1 조인트를 통해 제1 각도 회전하는 장착부; 저부가 상기 장착부와 연결되는 제2 조인트를 통해 제2 각도 회전하며, 상측부가 상부 링크부와 제3 조인트를 통해 연결되는 하부 링크부; 저부가 상기 하부 링크부와 연결되는 제3 조인트를 통해 제3 각도 회전하고, 상측부가 그리퍼와 제4 조인트를 통해 연결되는 상부 링크부; 및 일 측이 상기 상부 링크부와 제4 조인트를 통해 연결되며 제4 각도 회전하는 그리퍼;를 포함하며,상기 경로 설정부는상기 그리퍼의 초기 좌표값인 제1 좌표값과 객체가 위치하는 목표지점의 제2 좌표값 간 경유 지점인 제3 좌표값을 연산하는 경유지점 연산모듈; 상기 제1 좌표값과 제2 좌표값 및 제3 좌표값을 기준으로 하여 상기 그리퍼의 초기 위치로부터 객체까지의 도달을 위한 각 조인트들의 회전 각도를 설정하는 파라미터값 설정모듈; 및 상기 그리퍼가 제1 좌표값으로부터 제3 좌표값에 도달 시까지 가속되도록 하며 상기 제3 좌표값에서 제2 좌표값에 도달 시까지 감속되도록 제어하는 속도 설정모듈을 포함하고,상기 경유지점 연산모듈은제3 좌표값을 제1 좌표값의 x 좌표값 및 y 좌표값과 동일하되 제2 좌표값의 z 좌표값과 동일하게 설정하는 것을 특징으로 하는 휠체어 장착형 로봇팔 제어시스템.