요약본 발명의 실시예에 따른 로봇의 외력 관측 시스템은, 관절에 작용하는 토크의 측정이 가능한 로봇 유닛, 상기 로봇 유닛의 일측에 작용되는 외력을 측정하도록 상기 로봇 유닛의 일측 표면에 배치된 로봇 피부, 및 상기 로봇 피부가 측정한 제1 외력 및 상기 로봇 유닛이 측정한 토크를 이용하여 상기 로봇 피부에 작용되는 상기 외력의 정보를 추정하는 외력 추정 유닛을 포함할 수 있다. 본 발명은 연구과제 "로봇 피부의 분산형 5감 인지용 말초신경계 광섬유센서망 개발" (과제번호: SRFC-TC1903-0, 연구기간: 2020.07.01 ~ 2021.08.31)을 통해 부산대학교에 의해 개발된 기술에 관한 것이다.
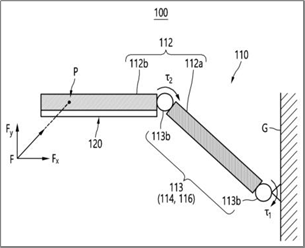
대표 청구항관절에 작용하는 토크의 측정이 가능한 로봇 유닛;상기 로봇 유닛의 일측에 작용되는 외력을 측정하도록 상기 로봇 유닛의 일측 표면에 배치된 로봇 피부; 및상기 로봇 피부이 측정한 제1 외력 및 상기 로봇 유닛이 측정한 토크를 이용하여 상기 로봇 피부에 작용되는 상기 외력의 정보를 추정하는 외력 추정 유닛;을 포함하고, 상기 로봇 유닛은, 회전 가능한 관절 구조로 연결된 복수개의 링크 부재; 상기 링크 부재들을 회전시키도록 상기 링크 부재들의 관절에 각각 마련된 링크 구동부; 및 상기 링크 부재들에 작용되는 토크를 측정하도록 상기 링크 부재들의 관절에 각각 마련된 토크 감지부;를 포함하며,상기 로봇 피부는 상기 링크 부재들 중 적어도 어느 하나의 링크 부재에 개별적으로 마련되고,상기 외력은, 상기 로봇 피부의 표면과 직교되는 Y축 방향으로 작용되는 외력의 Y축방향 힘; 및 상기 외력의 Y축방향 힘과 직교되도록 상기 로봇 피부의 표면과 나란한 X축 방향으로 작용되는 외력의 X축방향 힘;을 포함하며,상기 외력 추정 유닛은, 상기 제1 외력의 Y축방향 힘 및 상기 토크로부터 산출된 제2 외력의 Y축방향 힘을 이용하여 상기 외력의 Y축방향 힘을 추정하고, 상기 토크와 상기 외력의 관계식 및 상기 외력의 Y축방향 힘을 이용하여 상기 외력의 X축방향 힘을 추정하며,상기 로봇 피부는, 상기 외력이 작용되는 작용점을 측정하고, 상기 작용점에서 감지되는 상기 제1 외력의 Y축방향 힘을 측정하고,상기 외력 추정 유닛은, 상기 작용점과 상기 토크를 이용하여 상기 제2 외력의 Y축방향 힘을 추정하며,상기 외력 추정 유닛은, 상기 제1 외력의 Y축방향 힘과 상기 제2 외력의 Y축방향 힘을 상태관측기(state observer) 방법으로 섞어서 상기 외력의 Y축방향 힘을 추정하고,상기 외력 추정 유닛은, 상기 토크 감지부와 상기 로봇 피부의 측정 결과를 통해 상기 외력의 Y축방향 힘을 도출한 후 상기 토크와 상기 외력의 관계식을 이용하여 상기 외력의 Y축방향 힘으로부터 상기 외력의 X축방향 힘을 도출하는 것을 특징으로 하는 로봇의 외력 관측 시스템.