인공신경망에 기반한 행동 모방 로봇 제어 장치 및 방법, 이를 제공하기 위한 컴퓨터 프로그램이 기록된 컴퓨터 판독가능매체
경북대학교 산학협력단
강보영, 박성진, 강정훈
160
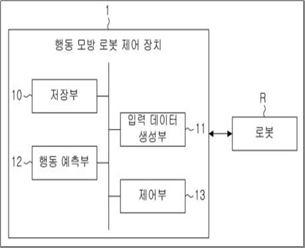
요약본 발명은 인공신경망에 기반한 행동 모방 로봇 제어 장치 및 방법, 컴퓨터-판독가능매체에 관한 것으로, 본 발명에 따르면, 사람의 행동에 대한 모습을 데이터로 구현한 사람 행동 데이터를 저장하는 저장부, 상기 사람 행동 데이터에서 하나 이상의 사람 관절에 대한 사람 관절 각도 데이터를 결합하여 입력 데이터를 생성하는 입력 데이터 생성부, 상기 사람 행동 데이터와 로봇 행동 정답 데이터의 데이터셋으로 학습된 인공신경망에 상기 입력 데이터를 입력하여 로봇 관절 각도 데이터를 출력하는 행동 예측부 및 상기 로봇 관절 각도 데이터를 통해 로봇의 행동을 제어하는 제어부를 포함하는 행동 모방 로봇 제어 장치를 제공할 수 있다. 또한 인공신경망에 기반한 행동 모방 로봇 제어 방법에 있어서, 하나 이상의 사람 관절에 대한 사람 관절 각도 데이터를 결합하여 입력 데이터를 상기 인공신경망에 입력 하는 입력단계, 상기 입력 데이터로부터 로봇 관절 각도 데이터를 예측하는 출력단계 및 상기 로봇 관절 각도 데이터를 통해 로봇의 행동을 제어하는 제어단계를 포함하는 행동 모방 로봇 제어 방법을 제공할 수 있다.
대표 청구항인공신경망에 기반한 행동 모방 로봇 제어 장치에 있어서,사람의 행동에 대한 모습을 데이터로 구현한 사람 행동 데이터를 저장하는 저장부;상기 사람 행동 데이터에서 하나 이상의 사람 관절에 대한 사람 관절 각도 데이터를 결합하여 입력 데이터를 생성하는 입력 데이터 생성부;상기 사람 행동 데이터와 로봇 행동 정답 데이터의 데이터셋으로 학습된 인공신경망에 상기 입력 데이터를 입력하여 로봇 관절 각도 데이터를 출력하는 행동 예측부 및상기 로봇 관절 각도 데이터를 통해 로봇의 행동을 제어하는 제어부를 포함하는 행동 모방 로봇 제어 장치.