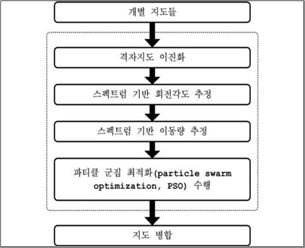
요약자율주행 로봇의 위치추정 및 지도작성을 위한 격자 지도 병합 방법은 2차원 격자 지도들로부터 스펙트럼을 추출하고, 추출된 스펙트럼 간 교차 상관관계를 이용하여 지도 간 회전 각도를 추정하는 단계와, 다시 스펙트럼을 추출하고, 추출된 스펙트럼을 기반으로 지도간 수평 및 수직방향 이동량을 추정하는 단계와, 추정된 회전 각도 및 수평 및 수직방향 이동량들을 기준으로 파티클 군집 최적화(particle swarm optimization, PSO)를 수행함으로써 지도 변환 행렬을 계산하고 병합된 지도를 획득하는 단계를 포함한다.
대표 청구항2차원 격자 지도들로부터 스펙트럼을 추출하고, 추출된 스펙트럼 간 교차 상관관계를 이용하여 지도 간 회전 각도를 추정하는 단계; 다시 스펙트럼을 추출하고, 추출된 스펙트럼을 기반으로 지도간 수평 및 수직방향 이동량을 추정하는 단계; 및 추정된 회전 각도 및 수평 및 수직방향 이동량들을 기준으로 파티클 군집 최적화(particle swarm optimization, PSO)를 수행함으로써 지도 변환 행렬을 계산하고 병합된 지도를 획득하는 단계; 를 포함하는 격자 지도 병합 방법.