요약본 발명은 소형 로봇의 주행속도 변화에 따라 약액 분사량이 제어되는 약액 분사 시스템에 관한 것으로서, 본원은 농업 및 다목적으로 사용할 수 있는 소형 로봇은 무인 다목적 소형로봇을 원격으로 조종하거나 경로 주행시 스스로 장애물 회피가 가능하도록 발명된 장치로서 작업자의 농약중독 등을 예방할 수 있는 로봇 기술을 제공하되 작물이 밀집(식물성장이 주변 식물과 비교할 경우 왕성[旺盛]함 포함)되어 있으면 약액 살포량을 증가하고 반대로 작물이 분산(식물 성장이 느져 왜소[矮小]함 포함 )되어 있으면 약액 살포량을 감소하는 소형 로봇의 주행속도 변화에 따라 약액 분사량이 제어되는 약액 분사 시스템에 관한 것이다 더나가, 로봇에 구성된 BLDC 구동모터의 회전속도를 증가시켜 주행속도가 빨라지면 상기 BLDC모터펌프의 회전속도를 증가시켜 약액살포량을 증가시키는 구성을 제공한다
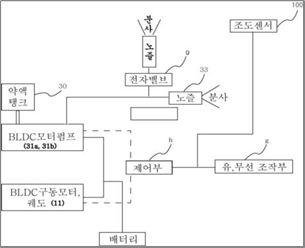
대표 청구항자율주행 제어에 사용되는 가속도센서(211), 자이로센서(212), 지자기센서(213), 위성안테나(215), 통신수단(230)이 장착된 자율주행 로봇몸체(15)는,베이스프레임(10) 회전속도를 가변할 수 있는 BLDC 구동모터(11), 상기 구동모터(11)의 구동부(12)와 연결되어 상기 BLDC 구동모터(11)의 회전속도에 따라 주행속도가 가변(속도가 빨라지거나 속도가 감소)되면서지면을 주행하는 궤도(13), 상기 구동모터(11)에 전원을 공급하는 배터리, 상기 베이스프레임(10) 상측에 슬라이드레일(14)을 포함하여 장착하고,상기 슬라이드레일(14)에 결합되는 슬라이드레일부(20)는 슬라이드레일(20)에 가이드되어 슬라이드 이동하면서 결합되고 분리되되 상기 슬라이드레일부(20)에 엑추레이터(21)와 로드(22)가 연결되고 상기 엑추레이터(21)는 약제탱크프레임(23)에 연결되며, 상기 약제탱크프레임(23)은 약제탱크(30)와, 상기 약제탱크(30)의 약제를 펌프하는 모터펌프(31)와, 상기 모터펌프(31)로부터 약제가 복수의 약제배관(32)과 노즐(33)을 탑재시켜 상기 궤도(13)를 통해 주행하면서 상기 노즐(33)에 의해 약제를 살포하고,상기 모터펌프(31)은 모터의 회전속도를 가변할 수 있는 BLDC모터펌프(31a)를 적용하여 조작부(g)와 제어부(h)를 통해 상기 BLDC모터펌프(31a)의 회전속도를 증가하면 약액분사량이 증가하도록 구성한 상태에서 상기 BLDC 구동모터(11)의 회전속도의 변화에 따라 상기 모터펌프(31a)의 회전속도를 증가하거나 감소되도록 제어하여 약액살포량이 조절되는 구성을 특징으로 하는 소형 로봇의 주행속도 변화에 따라 약액 분사량이 제어되는 약액 분사 시스템.