움직임 인식 기반의 자율 주행 로봇 제어 시스템 및 이를 이용한 자율 주행 로봇 제어 방법
국립부경대학교 산학협력단
김창원
154
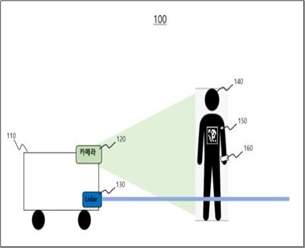
요약본 발명은 움직임 인식 기반의 자율 주행 로봇 제어 시스템 및 이를 이용한 자율 주행 로봇 제어 방법에 관한 것으로, 본 발명에 따른 움직임 인식 기반의 자율 주행 로봇 제어 시스템은 자율 주행 로봇을 이동시키는 구동부, 상기 구동부를 제어하여 상기 자율 주행 로봇의 이동을 제어하는 구동 제어부, 상기 자율 주행 로봇의 기 설정된 위치에서 기 설정된 방향의 영상을 촬영하는 카메라, 상기 자율 주행 로봇의 기 설정된 위치에서 상기 자율 주행 로봇의 주변 장애물을 탐지하는 라이다(Lidar), 상기 카메라에서 촬영된 영상을 기초로 영상 내에 포함된 추종 대상 객체를 식별하고, 상기 라이다를 통해 탐지된 주변 장애물을 기초로 상기 추종 대상 객체의 위치를 추정하는 위치 추정부, 상기 카메라에서 촬영된 영상을 기초로 상기 추종 대상 객체의 움직임을 인식하는 움직임 인식부 및 상기 위치 추정부에서 추정된 상기 추종 대상 객체의 위치를 기초로 자율 주행 로봇이 추종 대상 객체를 추종하도록 상기 구동 제어부를 제어하고, 상기 움직임 인식부에서 인식된 움직임에 대응되는 동작을 자율 주행 로봇이 실행하도록 상기 구동 제어부를 제어하는 로봇 제어부를 포함한다.
대표 청구항자율 주행 로봇의 동작을 제어하는 자율 주행 로봇 제어 시스템에 있어서,자율 주행 로봇을 이동시키는 구동부;상기 구동부를 제어하여 상기 자율 주행 로봇의 이동을 제어하는 구동 제어부;상기 자율 주행 로봇의 기 설정된 위치에서 기 설정된 방향의 영상을 촬영하는 카메라;상기 자율 주행 로봇의 기 설정된 위치에서 상기 자율 주행 로봇의 주변 장애물을 탐지하는 라이다(Lidar);상기 카메라에서 촬영된 영상을 기초로 영상 내에 포함된 추종 대상 객체를 식별하고, 상기 라이다를 통해 탐지된 주변 장애물을 기초로 상기 추종 대상 객체의 위치를 추정하는 위치 추정부;상기 카메라에서 촬영된 영상을 기초로 상기 추종 대상 객체의 움직임을 인식하는 움직임 인식부; 및상기 위치 추정부에서 추정된 상기 추종 대상 객체의 위치를 기초로 자율 주행 로봇이 추종 대상 객체를 추종하도록 상기 구동 제어부를 제어하고, 상기 움직임 인식부에서 인식된 움직임에 대응되는 동작을 자율 주행 로봇이 실행하도록 상기 구동 제어부를 제어하는 로봇 제어부를 포함하는 자율 주행 로봇 제어 시스템.