요약자율 이동 로봇 기반의 안면 및 동작 인식을 이용한 공사장 안전 관리시스템이 개시된다. 개시된 자율 이동 로봇 기반의 안면 및 동작 인식을 이용한 공사장 안전 관리시스템은 AI 알고리즘을 용이하여 산업 현장을 자율 이동하면서 산업 현장의 작업자 안면 및 동작 인식을 수행하여 작업자 상태를 분석하고, 안전 장구 착용에 대한 점검을 수행하는 다중 CMOS 카메라를 구비한 자율 이동 로봇; 상기 자율 이동 로봇이 산업 현장의 작업자 안면 및 동작 인식을 수행하여 작업자 상태를 분석하고, 안전 장구 착용에 대한 점검을 수행하도록 원격 제어하는 안전 관리 로봇 제어 서버;를 포함하는 것을 특징으로 한다.
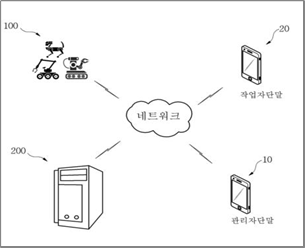
대표 청구항AI 알고리즘을 이용하여 산업 현장을 자율 이동하면서 산업 현장의 작업자 안면 및 동작 인식을 수행하여 작업자 상태를 분석하고, 안전 장구 착용에 대한 점검을 수행하도록 다중 CMOS 카메라, 레이더 센서 및 초음파 센서를 이용하여 주변을 감지하여 자율 이동을 수행하는 자율 이동 로봇;상기 자율 이동 로봇이 산업 현장의 작업자 안면 및 동작 인식을 수행하여 작업자 상태를 분석하고, 안전 장구 착용에 대한 점검을 수행하도록 원격 제어하는 안전 관리 로봇 제어 서버;를 포함하며, 상기 자율 이동 로봇은, 자율 이동 로봇의 위치를 실시간 측정하도록 구성된 위치 측정 모듈;상기 위치 측정 모듈에서 실시간 측정된 위치를 이용하여 산업 현장의 산업 현장 맵을 실시간 생성하고 업데이트하도록 구성된 SLAM 모듈;상기 SLAM 모듈에서 실시간 생성되고 업데이트되는 산업 현장 맵이 저장되도록 구성된 산업 현장 맵 저장 모듈;상기 산업 현장 맵 저장 모듈에 저장된 산업 현장 맵을 이용하여 산업 현장 내에서 자율 주행을 수행하도록 구성된 자율 주행 모듈;상기 위치 측정 모듈에서 실시간 측정된 위치를 상기 안전 관리 로봇 제어 서버로 실시간 송신하는 위치 송신 모듈;상기 SLAM 모듈에서 실시간 생성되고 업데이트되어 상기 산업 현장 맵 저장 모듈에 저장되는 산업 현장 맵을 상기 안전 관리 로봇 제어 서버로 실시간 송신하는 산업 현장 맵 송신 모듈;상기 산업 현장 맵 저장 모듈에 저장되는 산업 현장을 안전 관리 로봇 제어 서버로 실시간 업로드하는 산업 현장 맵 동기화 모듈;산업 현장 내 산업 현장 작업자의 안면 정보가 저장되도록 구성된 안면 정보 저장 모듈;상기 안면 정보 저장 모듈에 저장된 안면 정보를 상기 안전 관리 로봇 제어 서버로 실시간 업로드하는 안면 정보 동기화 모듈;상기 안면 정보 저장 모듈에 저장된 안면 정보를 참조하여 상기 다중 CMOS 카메라에서 생성된 영상에서 안면을 인식하도록 구성된 안면 인식 모듈;상기 안면 인식 모듈의 안면 인식 결과를 이용하여 안면 정보를 상기 안면 정보 저장 모듈에 등록하여 저장하도록 구성된 안면 정보 등록 모듈;상기 다중 CMOS 카메라에서 생성된 영상을 이용하여 산업 현장 작업자의 신체 형상 및 관절의 움직임을 인식하도록 구성된 신체 인식 모듈;적외선 센서에서 생성된 적외선 영상을 이용하여 상기 신체 인식 모듈에서 인식된 신체의 체온을 확인하도록 구성된 체온 확인 모듈;상기 안면 인식 모듈에서 인식된 안면에 기반하여 상기 신체 인식 모듈에서 인식된 신체에 대하여 표지를 부여하도록 구성된 안면 정보 기반 신체 표지 모듈;산업 현장에 사용되는 안전 장구 정보가 저장되도록 구성된 안전 장구 정보 저장 모듈;상기 안전 관리 로봇 제어 서버로부터 동기화되는 안전 장구 정보를 상기 안전 장구 정보 저장 모듈에 최종적으로 업데이트하여 동기화를 수행하는 안전 장구 정보 동기화 모듈;상기 안전 장구 정보 저장 모듈에 저장된 안전 장구 정보를 참조하여 상기 다중 CMOS 카메라에서 생성된 영상에서 안전 장구를 인식하는 안전 장구 인식 모듈;상기 안전 장구 인식 모듈에서 인식된 안전 장구를 이용하여 상기 안면 정보 기반 신체 표지 모듈에서 표지가 부여된 신체 별로 안전 장구 착용/미착용을 실시간 확인하도록 구성되며, 상기 다중 CMOS 카메라에서 생성된 영상을 통해 산업 현장 작업자가 위치한 작업 구역을 파악하여 해당 작업 구역에 대한 작업별 필요 안전 장구 목록을 설정하고, 상기 안전 장구 인식 모듈에서 인식된 안전 장구를 이용하여 설정된 작업별 필요 안전 장구 목록에 대한 착용/미착용을 실시간으로 확인하도록 구성된 안전 장구 미착용 확인 모듈;산업 현장 내 산업 현장 작업자의 동작 정보가 저장되도록 구성된 동작 정보 저장 모듈;상기 동작 정보 저장 모듈에 저장된 동작 정보를 상기 안전 관리 로봇 제어 서버로 실시간 업로드하는 동작 정보 동기화 모듈;상기 동작 정보 저장 모듈에 저장된 동작 정보를 참조하여 상기 다중 CMOS 카메라에서 생성된 영상에서 산업 현장 작업자의 동작을 인식하는 동작 인식 모듈;상기 안면 인식 모듈의 안면 인식 결과를 이용하여 상기 안면 정보 기반 신체 표지 모듈에서 표지가 부여된 신체 별로 이상 동작을 실시간 확인하도록 구성된 이상 상태 확인 모듈;상기 안전 장구 미착용 확인 모듈에서 현장 작업자에 대한 미착용 확인시, 미착용 항목을 지정하고, 착용 안내 음성을 실시간으로 출력하며, 상기 이상 동작 확인 모듈에서 이상 상태가 확인되는 경우, 확인된 이상 상태에 대응되는 경고음 또는 경고 안내 음성을 실시간 출력하는 경고음/경고안내 출력 모듈;상기 경고음/경고안내 출력 모듈에서 경고음 또는 경고 안내 음성 또는 착용 안내 음성이 출력되는 경우, 해당 경고 대상이 되는 산업 현장 작업자의 경고 대상 안면 정보를 상기 안전 관리 로봇 제어 서버로 실시간 송신하는 경고 대상 안면 정보 송신 모듈;상기 경고음/경고안내 출력 모듈에서 경고음 또는 경고 안내 음성 또는 착용 안내 음성이 출력되는 경우, 상기 안전 관리 로봇 제어 서버를 통해 관리자 단말과 화상 통화를 수행하는 화상 통화 모듈;을 포함하며, 상기 안전 장구 미착용 확인 모듈은, 안전 장구로부터 송신되는 블루투스 신호의 수신신호강도(RSSI, Received Signal Strength Indicator) 값을 기반으로 안전 장구와 상기 자율 이동 로봇과의 제1거리를 산출하고, 작업자가 소지한 작업자 단말로부터 송신되는 블루투스 신호의 수신신호강도(RSSI, Received Signal Strength Indicator) 값을 기반으로 상기 작업자 단말과 자율 이동 로봇과의 제2거리를 산출하여, 상기 제1거리와 제2거리의 수평 거리 차가 기준 설정 범위를 벗어난 경우 작업자가 안전장구를 벗어 분리한 것으로 판단하여 미착용을 확인하도록 구성되며, 상기 안전 관리 로봇 제어 서버는, 상기 안전 장구 미착용 확인 모듈의 안전 장구 착용/미착용에 관한 확인 결과를 실시간 수집하여 해당 산업 현장의 안전 장구 착용률을 실시간 분석하는 안전 장구 착용률 분석 모듈;상기 경고 대상 안면 정보 송신 모듈로부터 경고 대상 안면 정보를 실시간 수신하는 경고 대상 안면 정보 수신 모듈;상기 안면 정보 동기화 모듈로부터 실시간 업로드되는 각 안면 정보가 저장되는 안면 정보 데이터베이스;산업 현장 작업자 정보가 미리 등록되어 저장되도록 구성된 산업 현장 작업자 정보 데이터베이스;상기 산업 현장 작업자 정보 데이터베이스에 저장된 산업 현장 작업자 정보와 상기 안면 정보 데이터베이스에 저장된 안면 정보를 상호 매칭하여 확인하도록 구성된 산업 현장 작업자 매칭 모듈;상기 산업 현장 작업자 매칭 모듈의 상호 매칭 결과에 기반하여 상호 매칭이 이루어지지 않는 안면 정보를 확인하여 해당 산업 현장의 산업 현장 작업자 외의 외부인을 실시간 추출하고, 외부인에 대한 경고 안내 음성을 출력하도록 추출된 외부인의 안면정보를 상기 자율 이동 로봇에 실시간 제공하는 외부인 추출 모듈;을 포함하는 것을 특징으로 하는 공사장 안전 관리시스템.