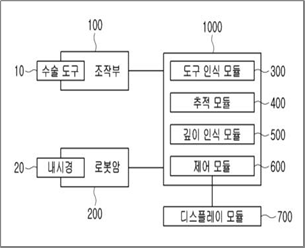
요약본 발명은 수술도구에 설치되도록 구성되는 조작부; 내시경이 설치되도록 구성되는 로봇 암; 상기 내시경에 의해 촬영되는 영상에서 상기 수술도구의 동작을 인식하는 도구 인식 모듈; 상기 수술도구의 동작을 추적하는 추적 모듈; 상기 로봇 암의 관절 동작에 따라 상기 내시경이 복강 내에 삽입된 깊이를 인식하는 깊이 인식 모듈; 상기 내시경에 의해 촬영되는 영상을 표시하는 디스플레이 모듈; 및 상기 로봇 암의 동작을 제어하는 제어 모듈;을 포함하며, 상기 제어 모듈은, 상기 깊이 인식 모듈에 의해 인식된 상기 내시경이 복강 내에 삽입된 깊이에 따라 상기 내시경의 촬영각도를 변화시키는 상기 로봇 암의 동작 속도를 제어하는 내시경 보조 로봇 시스템을 제공한다.
대표 청구항수술도구(10)에 설치되도록 구성되는 조작부(100); 내시경(20)이 설치되도록 구성되는 로봇 암(200); 상기 내시경(20)에 의해 촬영되는 영상에서 상기 수술도구(10)의 동작을 인식하는 도구 인식 모듈(300); 상기 수술도구(10)의 동작을 추적하는 추적 모듈(400); 상기 로봇 암(200)의 관절 동작에 따라 상기 내시경(20)이 복강 내에 삽입된 깊이를 인식하는 깊이 인식 모듈(500); 상기 내시경(20)에 의해 촬영되는 영상을 표시하는 디스플레이 모듈(700); 및 상기 로봇 암(200)의 동작을 제어하는 제어 모듈(600);을 포함하며, 상기 제어 모듈(600)은, 상기 깊이 인식 모듈(500)에 의해 인식된 상기 내시경(20)이 복강 내에 삽입된 깊이에 따라 상기 내시경(20)의 촬영각도를 변화시키는 상기 로봇 암(200)의 동작 속도를 제어하는, 내시경 보조 로봇 시스템.