요약본 발명은 스마트팜용 낙과 청소기의 낙과 처리장치 및 방법에 관한 것으로, 청소 바닥면의 부직포의 들뜸을 방지하는 가이드가 구비하고, 낙과 청소시 들뜸방지 가이드를 부직포를 압착시킨 후 낙과를 흡입시키므로 부직포 손상을 방지하도록 하는데 그 목적이 있다.
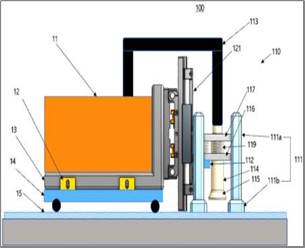
대표 청구항스마트팜에서 자율이동로봇(AMR)에 탑재된 낙과청소기가 스마트팜의 작업공간을 따라 자율 주행하면서 바닥면의 낙과를 흡입하는 스마트팜용 낙과 청소기의 낙과처리장치에 있어서, 상기 낙과청소기는 상기 자율이동로봇(AMR)에 탑재된 집진모듈; 낙과가 감지됨에 따라 낙과위치에 이동 및 하강하여 낙과를 흡입하는 낙과청소모듈; 및 상기 낙과청소모듈이 상기 자율형이동로봇(AMR)의 전면에서 승하강 되도록 연결하는 승하강 연결부재;를 포함하되, 상기 낙과청소모듈은 상기 승하강 연결부재를 통해 바닥면까지 승하강 되어 바닥면 부직포의 들뜸을 방지하는 들뜸방지부재; 상기 낙과청소모듈에 구비되어 낙과를 감지하는 비젼모듈; 및 상기 낙과청소모듈이 낙과위치로 하강하여 낙과를 진공흡입하여 집진통으로 보내는 흡입노즐 및 흡입관;을 포함하여 이루어진 것을 특징으로 하는 스마트팜용 낙과 청소기의 낙과처리장치.