Home
플랫폼 소개
NRF-TCC 플랫폼
참여기관
연락처/오시는길
기술이전·사업화 기술 정보
기술이전·사업화 대상 기술
기술도입 상담신청
대학 국가전략기술 정보
국가전략기술 현황
국가전략기술 목록
IP 수익화 프로그램 정보
해외 IP 전주기 수익화
해외 IP 표준특허 Pool 수익화
해외 IP 침해분석/매각 수익화
초격차 IP 라이센싱 수익화
공지·알림
공지사항
대학 정보 서비스
대학 기술정보 관리 시스템
대학 전담인력 교육지원 시스템
대학 전담인력 커리어패스 맵
Home
플랫폼 소개
NRF-TCC 플랫폼
참여기관
연락처/오시는길
기술이전·사업화 기술 정보
기술이전·사업화 대상 기술
기술도입 상담신청
대학 국가전략기술 정보
국가전략기술 현황
국가전략기술 목록
IP 수익화 프로그램 정보
해외 IP 전주기 수익화
해외 IP 표준특허 Pool 수익화
해외 IP 침해분석/매각 수익화
초격차 IP 라이센싱 수익화
공지·알림
공지사항
대학 정보 서비스
대학 기술정보 관리 시스템
대학 전담인력 교육지원 시스템
대학 전담인력 커리어패스 맵
Home
대학 국가전략기술 정보
국가전략기술 목록
수중글라이더 회수용 수중로봇을 운용하는 방법
국립부경대학교 산학협력단
서진호
151
요약
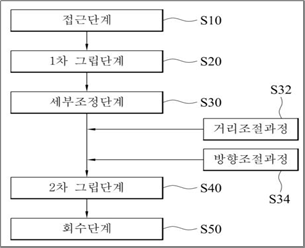
본 발명에 따른 수중글라이더 회수용 수중로봇을 운용하는 방법은, 수중을 탐사하는 수중글라이더를 회수하기 위해 수중글라이더 회수용 수중로봇을 운용하는 방법으로서, 상기 수중로봇을 제어하여 수면 위를 표류하는 상기 수중글라이더에 접근시키는 접근단계, 상기 수중글라이더가 수면의 흐름에 따라 유동되는 것을 방지하기 위해 상기 수중글라이더에 형성되는 회수고리를 파지하여 상기 수중글라이더의 유동을 방지하는 1차 그립단계, 상기 1차 그립단계를 수행하여 상기 회수고리를 파지한 상태에서 상기 수중글라이더를 고정시키도록 상기 수중로봇과 상기 수중글라이더 사이의 간격을 조절하는 세부조정단계, 상기 회수고리가 파지된 상기 수중글라이더와 상기 수중로봇 사이의 간격이 조정된 상태에서 상기 수중로봇이 상기 수중글라이더를 고정시키도록 상기 수중글라이더의 몸통을 파지하는 2차 그립단계 및 상기 수중로봇을 제어하여 상기 수중로봇에 고정된 상기 수중글라이더를 회수하는 회수단계를 포함하는 수중글라이더 회수용 수중로봇을 운용하는 방법을 제공한다.
대표 청구항
수중을 탐사하는 수중글라이더를 회수하기 위해 수중글라이더 회수용 수중로봇을 운용하는 방법으로서,상기 수중로봇을 제어하여 수면 위를 표류하는 상기 수중글라이더에 접근시키는 접근단계;상기 수중글라이더가 수면의 흐름에 따라 유동되는 것을 방지하기 위해 상기 수중글라이더에 형성되는 회수고리를 파지하여 상기 수중글라이더의 유동을 방지하는 1차 그립단계;상기 1차 그립단계를 수행하여 상기 회수고리를 파지한 상태에서 상기 수중글라이더를 고정시키도록 상기 수중로봇과 상기 수중글라이더 사이의 간격을 조절하는 세부조정단계;상기 회수고리가 파지된 상기 수중글라이더와 상기 수중로봇 사이의 간격이 조정된 상태에서 상기 수중로봇이 상기 수중글라이더를 고정시키도록 상기 수중글라이더의 몸통을 파지하는 2차 그립단계; 및상기 수중로봇을 제어하여 상기 수중로봇에 고정된 상기 수중글라이더를 회수하는 회수단계를 포함하는,수중글라이더 회수용 수중로봇을 운용하는 방법.
대표 도면
전략기술 분류
첨단로봇·제조
고난도 자율조작
출원번호
10-2022-0117974
KIPRIS
출원일
2022-09-19
공개번호
10-2024-0039420
공개일
2024-03-26
등록번호
등록일
우선권 번호
우선권 국가
우선권 주장일
현재 상태
심사중
현재 권리자
IPC 코드
B63B-027/16, B63C-011/48, B25J-011/00, B25J-009/16, B25J-013/00, B25J-013/08, B25J-019/02
목록으로 가기