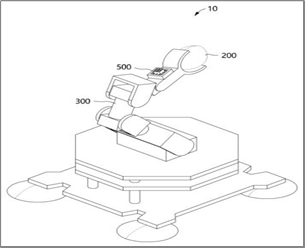
요약일 실시예에 따른 집광 장치는, 로봇매니퓰레이터를 구비하는 집광 장치로서, 상기 집광 장치의 위치와 방향 정보를 획득하는 감지부; 태양의 실제 입사각을 측정하는 측정부; 상기 감지부의 정보를 이용하여 태양의 이론적 위치값을 규명하는 연산부- 연산부는 감지부의 GPS 및 Compass 센서값을 바탕으로, 태양의 위치와 방향을 계산하는 제1연산부재, 측정부의 광 의존 저항기 16 array의 센서값을 읽어 태양의 실제 위치와 방향과의 offset을 계산하는 제2연산부재, 및 end-effector가 제1연산부재 또는 제2연산부재에서 계산한 태양의 위치와 방향을 향하도록 역기구학을 푸는 제3연산부재를 포함함-; 상기 연산부 및 상기 측정부의 정보를 이용하여 상기 로봇매니퓰레이터를 제어하는 제어부; 상기 로봇매니퓰레이터의 단부에 배치되고, 태양광을 집광하여 초점을 가열하는 집열부; 및 배터리;를 포함하고, 상기 제어부는 상기 집열부의 평면이 태양의 입사각과 직각을 이루도록 상기 로봇매니퓰레이터를 정밀 보정할 수 있다.
대표 청구항로봇매니퓰레이터를 구비하는 집광 장치로서,상기 집광 장치의 위치와 방향 정보를 획득하는 감지부;태양의 실제 입사각을 측정하는 측정부;상기 감지부의 정보를 이용하여 태양의 이론적 위치값을 규명하는 연산부;상기 연산부 및 상기 측정부의 정보를 이용하여 상기 로봇매니퓰레이터를 제어하는 제어부;상기 로봇매니퓰레이터의 단부에 배치되고, 태양광을 집광하여 초점을 가열하는 집열부; 및배터리;를 포함하고,상기 제어부는 상기 집열부의 평면이 태양의 입사각과 직각을 이루도록 상기 로봇매니퓰레이터를 정밀 보정하며,상기 측정부는,각각 일면이 개방된 육면체로 이루어지고 정각행렬로 배열되고 동일단면으로 구획된 복수의 격실을 포함하는 격실부재; 및각각의 상기 격실의 일면에 대향하는 면에 설치되는 광 의존 저항기;를 포함하고,상기 광 의존 저항기는 상기 격실에 도달하는 광 입자량으로부터 전압값을 획득하며,상기 격실부재는,제1높이의 격벽을 가지는 적어도 하나의 격실을 포함하는 제1격실세트; 및상기 제1격실세트의 둘레에 배치된 복수의 격실들을 포함하는 제2격실세트;를 포함하고,상기 제2격실세트의 격실들은 제2높이의 격벽을 가지고,상기 제2격실세트보다 상기 제1격실세트 내에 배치된 상기 광 의존 저항기의 전압값 변화 민감도가 더 커지도록 상기 제1높이가 상기 제2높이보다 더 높으며,상기 연산부는 역기구학을 풀어 상기 로봇매니퓰레이터의 위치와 방향을 계산하고,상기 연산부는 상기 광 의존 저항기에서 획득된 전압값을 이용하여 태양의 실제 위치 및 방향과 상기 로봇매니퓰레이터의 위치 및 방향 사이의 오프셋값을 계산하고,상기 연산부는 다시 역기구학을 풀어 상기 제어부가 상기 오프셋값에 따라 상기 로봇매니퓰레이터를 제어하는, 집광 장치.