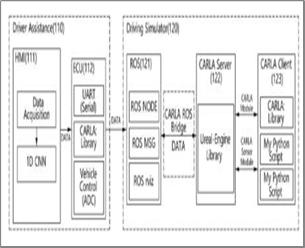
요약반자율 자동차의 운전 보조 시스템을 위한 인간-기계 상호작용 방법 및 시스템이 제시된다. 본 발명에서 제안하는 반자율 자동차의 운전 보조 시스템을 위한 인간-기계 상호작용 시스템은 운전자의 생체신호 기반 CNN 모델을 이용하여 운전자의 감정 및 상황을 분류하고, 상황인식 결과 데이터를 ECU 보드로 전송하는 HMI(Human machine interface), 수신 받은 HMI 결과데이터를 이용하여 반자율 주행 가상환경에 관한 복수의 시나리오를 생성하는 ECU(Electronic Control Unit) 보드, CARLA(Car Learning to Act) 시뮬레이터를 통해 반자율 주행을 실행하기 위한 반자율 주행 가상환경에 관한 차량정보 및 센서데이터를 관리하는 ROS(Robot operating system) 및 상기 차량정보 및 센서데이터를 이용하여 상기 반자율 주행 가상환경에 관한 복수의 시나리오에 따라 CARLA 클라이언트의 반자율 주행을 실행하는 CARLA 서버를 포함한다.
대표 청구항운전자의 생체신호 기반 CNN 모델을 이용하여 운전자의 감정 및 상황을 분류하고, 상황인식 결과 데이터를 ECU 보드로 전송하는 HMI(Human machine interface); 수신 받은 HMI 결과데이터를 이용하여 반자율 주행 가상환경에 관한 복수의 시나리오를 생성하는 ECU(Electronic Control Unit) 보드; CARLA(Car Learning to Act) 시뮬레이터를 통해 반자율 주행을 실행하기 위한 반자율 주행 가상환경에 관한 차량정보 및 센서데이터를 관리하는 ROS(Robot operating system); 및 상기 차량정보 및 센서데이터를 이용하여 상기 반자율 주행 가상환경에 관한 복수의 시나리오에 따라 CARLA 클라이언트의 반자율 주행을 실행하는 CARLA 서버를 포함하는 인간-기계 상호작용 시스템.