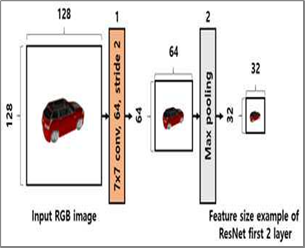
요약본 발명은 딥러닝 기법을 사용한 RGB 이미지의 3D 포인트 클라우드 재구축 시스템 및 그 방법에 관한 것으로, 단일 RGB 이미지만으로 3D 포인트 클라우드를 재구축하기 위한 딥러닝 기법을 사용한 RGB 이미지의 3D 포인트 클라우드 재구축 시스템 및 그 방법에 관한 것이다. 본 발명의 일측면에 따른 시스템은 단일 입력 RGB 이미지에 대한 특징점인 feature map을 추출하는 특징 맵 추출부(110), 잠재 벡터를 생성하는 잠재 벡터 생성부(120), 3D 포인트 클라우드를 재구축하는 3D 포인트 클라우드 재구축부(130) 및 단일 RGB 이미지로부터 재구축된 3D 포인트 클라우드의 정확도를 향상시키는 Loss 계산 및 딥러닝 네트워크 학습부(140)를 포함하여 적은 메모리로 자세한 표현이 가능한 3D 포인트 클라우드 형태의 데이터로 딥러닝 기법을 사용한 RGB 이미지의 3D 포인트 클라우드를 재구축하여 가상의 대규모 공간을 만들거나 저사양의 시스템에서 효율적으로 사용할 수 있는 효과가 있다.
대표 청구항입력 RGB 이미지에 대한 특징점인 feature map을 추출하는 특징 맵 추출부(110), 상기 특징 맵 추출부에서 추출한 feature map으로 잠재 벡터를 생성하는 잠재 벡터 생성부(120), 상기 잠재 벡터를 decoder 네트워크의 입력데이터로 사용하여 3D 포인트 클라우드를 재구축하는 3D 포인트 클라우드 재구축부(130) 및 상기 3D 포인트 클라우드 재구축부를 통해 재구축한 3D 포인트 클라우드와 학습 데이터셋의 원본 3D 포인트 클라우드 사이의 차이를 계산하여 딥러닝 네트워크를 학습하여 단일 RGB 이미지로부터 재구축된 3D 포인트 클라우드의 정확도를 향상시키는 Loss 계산 및 딥러닝 네트워크 학습부(140)를 포함하는 것을 특징으로 하는 딥러닝 기법을 사용한 RGB 이미지의 3D 포인트 클라우드 재구축 시스템.