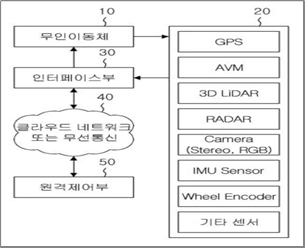
요약본 발명은 엣지컴퓨팅 및 인공지능 융합 기술 기반 무인이동체 원격주행제어 시스템에 관한 것으로, 보다 상세하게는 엣지컴퓨팅 모듈 위에 인공지능 기술을 탑재하여 원격으로 지상에서 무인이동체 주행 및 운행을 안전하게 제어할 수 엣지컴퓨팅 및 인공지능 융합 기술 기반 무인이동체 원격주행제어 시스템에 관한 것이다. 본 발명에 따른 엣지컴퓨팅 및 인공지능 융합 기술 기반 무인이동체 원격주행제어 시스템은, 모터를 동력원으로 주행이 가능한 무인이동체; 상기 무인이동체의 주행 정보 및 상기 무인이동체 주변의 환경 정보를 획득할 수 있는 다수의 센서가 구비된 센서부; 상기 센서부로부터 각종 정보를 입력 받고, 제어신호에 따라 상기 무인이동체를 제어할 수 있는 인터페이스; 및 클라우드 네트워크 또는 무선통신을 이용하여 원격에서 상기 인터페이스부와 정보를 송수신하되, 상기 인터페이스로부터 수신된 정보를 분석 및 모니터링하고, 상기 무인이동체의 주행을 제어할 수 있는 제어신호를 상기 인터페이스부로 송신하는 원격제어부;를 포함하되, 상기 원격제어부는, 지상서버 또는 엣지컴퓨터로 구성되고, 상기 인터페이스로부터 수신된 정보로부터 장애물, 사물, 차선, 주행영역 및 노면상태를 포함하는 주행환경을 인식하고, 인식된 주행환경에 따라 인공지능 기법을 활용하여 충돌회피, 긴급상황 대응 및 정해진 특수목적작업 구현을 포함한 상황대처를 판단하며, 판단된 상황대처에 대응되는 제어신호를 생성하는 것을 특징으로 한다.
대표 청구항모터를 동력원으로 주행이 가능한 무인이동체; 상기 무인이동체의 주행 정보 및 상기 무인이동체 주변의 환경 정보를 획득할 수 있는 다수의 센서가 구비된 센서부; 상기 센서부로부터 각종 정보를 입력 받고, 제어신호에 따라 상기 무인이동체를 제어할 수 있는 인터페이스; 및 클라우드 네트워크 또는 무선통신을 이용하여 원격에서 상기 인터페이스부와 정보를 송수신하되, 상기 인터페이스로부터 수신된 정보를 분석 및 모니터링하고, 상기 무인이동체의 주행을 제어할 수 있는 제어신호를 상기 인터페이스부로 송신하는 원격제어부;를 포함하되, 상기 원격제어부는, 지상서버 또는 엣지컴퓨터로 구성되고, 상기 인터페이스로부터 수신된 정보로부터 장애물, 사물, 차선, 주행영역 및 노면상태를 포함하는 주행환경을 인식하고, 인식된 주행환경에 따라 인공지능 기법을 활용하여 충돌회피, 긴급상황 대응 및 정해진 특수목적작업 구현을 포함한 상황대처를 판단하며, 판단된 상황대처에 대응되는 제어신호를 생성하는 것을 특징으로 하는 엣지컴퓨팅 및 인공지능 융합 기술 기반 무인이동체 원격주행제어 시스템.