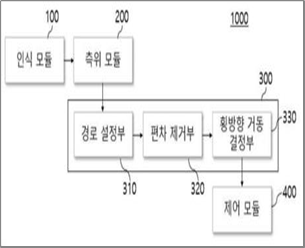
요약자율주행 차량의 측위 헤딩오차 보정 장치 및 그의 동작 방법이 개시된다. 본 발명의 실시 예에 따른 자율주행 차량의 측위 헤딩오차 보정 장치는, 도로 형상 정보 및 GPS/IMU 정보를 인식하는 인식 모듈, 인식 모듈에 의해 인식된 도로 형상 정보 및 GPS/IMU 정보를 이용하여 헤딩 정보를 추정하는 측위 모듈, 측위 모듈로부터 자 차량의 위치정보 및 헤딩 정보를 제공받아 목표 주행 경로를 설정하는 거동계획 모듈, 및 설정된 목표 주행 경로에 따라 자 차량이 주행하도록 제어하는 제어 모듈을 포함한다.
대표 청구항도로 형상 정보 및 GPS/IMU 정보를 인식하는 인식 모듈;상기 인식 모듈에 의해 인식된 도로 형상 정보 및 GPS/IMU 정보를 이용하여 헤딩 정보를 추정하는 측위 모듈;상기 측위 모듈로부터 자 차량의 위치정보 및 헤딩 정보를 제공받아 목표 주행 경로를 설정하는 거동계획 모듈; 및상기 설정된 목표 주행 경로에 따라 상기 자 차량이 주행하도록 제어하는 제어 모듈;을 포함하고,상기 거동계획 모듈은,상기 자 차량의 주행차선의 차로 중심선 정보와 상기 추정된 헤딩 정보를 이용하여 로컬 좌표계 기준의 목표 주행 경로를 설정하고, 상기 설정된 목표 주행 경로를 이용하여 자 차량의 상태정보를 결정하는 경로 설정부;상기 결정된 자 차량의 상태정보로부터 헤딩 편차를 추정하고, 상기 추정된 헤딩 편차를 제거하여 보정된 상태정보를 생성하는 편차 제거부; 및상기 보정된 상태정보를 이용하여 목표 횡방향 거동을 결정하는 횡방향 거동 결정부;를 포함하며,상기 경로 설정부는, 하기의 수식을 이용하여 상기 자 차량의 상태를 결정하는 것을 특징으로 자율주행 차량의 측위 헤딩오차 보정 장치: 여기서, 은 상기 자 차량의 상태 정보, 는 슬립 비(Slip ratio), 는 요 각속도(Yaw rate), 는 헤딩 에러, 는 측방향 위치 에러, T는 현재 시간이다.