요약본 발명은 움직이는 차량 그룹의 정밀한 작동을 위한 GNSS(Global Navigation Satellite Systems) RTK(Realtime Kinematic) 위치결정 방법에 관한 것으로, 특히 복수의 에이전트[차량의 로버(rover) 수신기] 간에 센티미터 수준의 상대 위치결정을 위해 안테나 어레이 RTK, 고정된 모호 정수 및 RTK 기준선의 브로드캐스터(Broadcast)를 기반으로 하는, 움직이는 차량 그룹의 정밀한 작동을 위한 GNSS RTK 위치결정 방법에 관한 것이다.
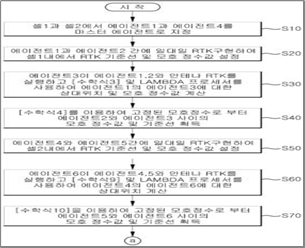
대표 청구항움직이는 세 차량의 로버 수신기인 에이전트 1, 2, 3이 포함되어 있는 셀 1과 움직이는 다른 세 차량의 로보 수신기인 에이전트 4, 5, 6이 포함되어 있는 셀 2간의 상대 위치 결정을 위한, 움직이는 차량 그룹의 정밀한 작동을 위한 GNSS(Global Navigation Satellite Systems) RTK(Realtime Kinematic) 위치결정 방법으로서, 상기 셀 1과 상기 셀 2에서 상기 에이전트 1과 상기 에이전트 4를 마스터 에이전트로 지정하는 제1 단계; 상기 에이전트 1과 상기 에이전트 2간에 일대일 RTK를 구현하여 셀 1 내에서 RTK 기준선 및 모호 정수 벡터를 설정하는 제2 단계; 상기 에이전트 3이 상기 에이전트 1, 2와 안테나 RTK를 실행하여 상기 에이전트 1의 상기 에이전트 3에 대한 상대 위치를 계산하는 제3 단계; 고정된 모호 정수로부터 상기 에이전트 2와 상기 에이전트 3 사이의 모호 정수 값과 기준선을 획득하는 제4 단계; 상기 에이전트 4와 상기 에이전트 5간에 일대일 RTK를 구현하여 셀 2 내에서 RTK 기준선 및 모호 정수 벡터를 설정하는 제5 단계; 상기 에이전트 6이 상기 에이전트 4, 5와 안테나 RTK를 실행하여 상기 에이전트 4의 상기 에이전트 6에 대한 상대 위치를 계산하는 제6 단계; 고정된 모호 정수로부터 상기 에이전트 5와 상기 에이전트 6 사이의 모호 정수 값과 기준선을 획득하는 제7 단계; 상기 에이전트 1이 상기 에이전트 4와 RTK 기준선 및 모호 정수 값을 설정하는 제8 단계; 상기 에이전트 1과 상기 에이전트 4가 자신의 셀 내 에이전트의 고정된 모호 정수를 서로 교환하는 제9 단계; 상기 에이전트 1, 4가 다른 셀의 고정된 모호 정수를 자신의 셀 내 에이전트에게 브로드캐스트(Broadcast)하는 제10 단계; 각 에이전트가 ART(Ambiguity Resolution Table) 프로세스를 구현하는 제11 단계;를 포함하는 GNSS RTK 위치결정 방법.