요약본 발명은 항공기의 런치 패드 보조 GNSS 상대 위치 결정 장치 및 방법에 관한 것으로, 특히 설정 거리 만큼 이격되어 있으며 항공기가 이착륙할 수 있는 두 개의 런치 패드(launchpad)를 마련하여 그 위에 마스터 GNSS 수신기와 팔로워 GNSS 수신기를 배치하고 로컬 좌표계의 원점은 마스터 GNSS 수신기의 위치에 위치한 상태에서 항공기의 GNSS 상대 위치를 결정하는, 항공기의 런치 패드 보조 GNSS 상대 위치 결정 장치 및 방법에 관한 것이다.
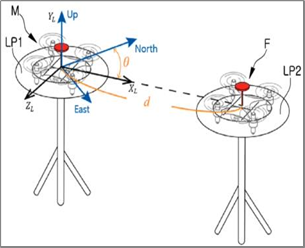
대표 청구항설정된 거리(d) 만큼 이격되고 항공기가 이착륙할 수 있는 두 개의 런치 패드를 마련하여 그 위에 마스터 GNSS 수신기(M)와 팔로워 GNSS 수신기(F)를 배치하고, 로컬 좌표계의 원점(XL, YL, ZL)은 상기 마스터 GNSS 수신기의 위치에 위치한 상태에서, 항공기의 GNSS 상대 위치를 결정하는, 항공기의 런치 패드 보조 GNSS 상대 위치 결정 장치로서, 상기 거리(d) 및 북쪽 방향에 대한 XL의 방위각(θ)에 대한 정보를 입력받도록 구성된 거리 및 방위각 입력부(100);상기 마스터 GNSS 수신기 및 팔로워 GNSS 수신기가 지상에서 동일 높이에 있다고 가정한 상태에서 상기 거리 및 방위각을 기초로 팔로워 GNSS 수신기에 대한 ENU 좌표계의 사전 상대 위치[ ]를 산출하도록 구성된 ENU 좌표계 사전 상대 위치 산출부(200);상기 팔로워 GNSS 수신기에 대한 ENU 좌표계의 사전 상대 위치를 이중 차분 연산을 하고 반올림 연산하여 미지 정수( )를 산출하도록 구성된 이중 차분 연산 및 반올림 연산부(300); 및상기 이중 차분 연산 및 반올림 연산부에 의해 산출된 미지 정수를 수정하여 평균화된 미지 정수( )를 산출하도록 구성된 미지 정수 수정부(350); 및상기 미지 정수 수정부에 의해 산출된 평균화된 미지 정수를 이용하여 n-1 개의 위성에 대한 미지 정수를 구하고, 최종 상대 위치( )를 산출하도록 구성된 최종 상대 위치 산출부(400);를 포함하며, 상기 팔로워 GNSS 수신기에 대한 ENU 좌표계의 사전 상대 위치[ ]는,다음의 [수학식 5]에 의해서 산출되는, 항공기의 런치 패드 보조 GNSS 상대 위치 결정 장치.[수학식 5] [여기서, d는 두 개의 런치 패드의 설정된 이격 거리를 나타내고, θ는 마스터 GNSS 수신기의 북쪽 방향에 대한 XL의 방위각을 나타냄]