요약본 발명은 우주선을 위한 적응형 슬라이딩 모드 자세 제어 방법 및 장치에 관한 것으로서, 더욱 상세하게는 우주선 자세에 부과된 제약을 처리하기 위해 시변 게인을 포함하는 Funnel control 기반의 자세 제어 방법 및 장치에 관한 것이다. 본 발명에 의하면, 본 발명은 이와 같은 문제점을 해결하기 위해 창안된 것으로서, 우주선 자세에 부과된 제약을 처리하기 위해 시변 게인을 포함하는 Funnel control 기반의 새로운 자세 제어 방식 적용하여, 기존 자세 제어 방식과 달리 단편적인 연속 함수 없이 특이점 문제를 직접 해결하여 더 간단히 안정성 분석이 가능하게 하는 자세 제어 방법 및 장치를 제공한다. 또한 관성 매트릭스 불확실성과 공간 교란으로 구성된 총 불확실성에 대처하기 위해 신경망 기반의 적응 메커니즘을 통하여 시스템 궤도가 원점으로 수렴하는 데 유한한 시간만 필요하게 하고, 이 시간은 컨트롤러에서 독립 매개 변수를 할당하여 선험적으로 명확하게 지정되는 것이 분석적으로 보장되게 함으로써, 수렴 시간을 결정하는 절차를 매우 단순화하는 자세 제어 방법 및 장치를 제공한다.
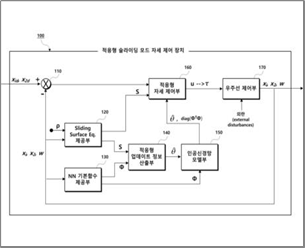
대표 청구항우주선의 적응형 슬라이딩 모드 자세 제어 방법으로서,(a) 우주선에 대하여 측정된 자세값(이하 's측정 자세값's이라 한다)과, 목표 자세값과 차이값(이하 's자세 오차's라 한다)를 산출하는 단계;(b) Sliding surface equation 및 인공신경망 모델의 기본함수를 이용하여, 상기 인공신경망 모델의 업데이트를 위한 정보(이하 's업데이트 정보's라 한다)를 산출하는 단계;(c) 상기 업데이트 정보를 이용하여 상기 인공신경망 모델의 업데이트를 수행하는 단계;(d) 상기 인공신경망 모델에서 외란(disturbance) 추정값을 산출하는 단계; 및,(e) 상기 Sliding surface equation 및 상기 외란 추정값으로부터, 상기 우주선의 자세를 제어하기 위한 제어 토크 값을 산출하는 단계를 포함하고,상기 sliding surface equation은,변수가 해당 sliding surface에 다가가도록 제어하는 스위칭 함수(switching function)와 동일한 함수를 사용하며,상기 스위칭 함수는,미분불가능한 특이점(singularity)이 없는 비특이 제약 스위칭 함수(nonsingular constrained switching function, NCSF)인,우주선의 적응형 슬라이딩 모드 자세 제어 방법.